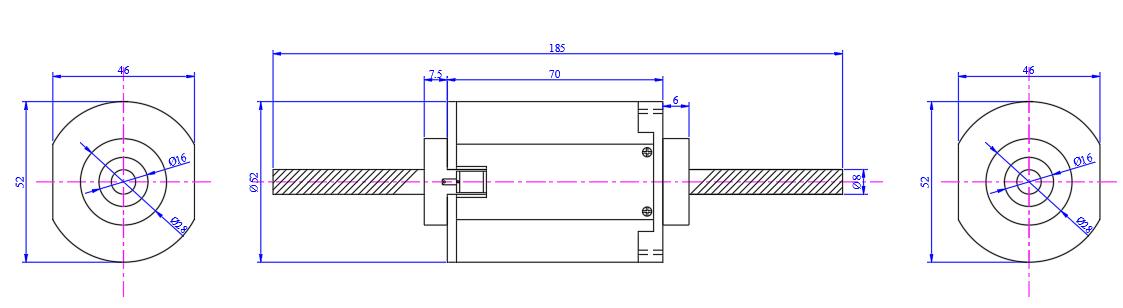
Servomotor DC de precisión 46S/185-8A

Características básicas do servomotor DC: (outros modelos, o rendemento pódese personalizar)
| 1. Tensión nominal: | DC 7,4 V | 5. Velocidade nominal: | ≥ 2600 rpm |
| 2. Rango de tensión de funcionamento: | DC 7,4 V-13 V | 6. Corrente de bloqueo: | ≤2,5A |
| 3. Potencia nominal: | 25 W | 7.Corrente de carga: | ≥1A |
| 4. Dirección de rotación: | O eixe de saída CW está arriba | 8. Distancia do eixe: | ≤ 1,0 mm |
Diagrama de aspecto do produto
Tempo de caducidade
Desde a data de produción, o período de uso seguro do produto é de 10 anos e o tempo de traballo continuo é ≥ 2000 horas.
Características do produto
1. Deseño compacto e con aforro de espazo;
2.Estrutura de rodamentos de esferas;
3.Longa vida útil do cepillo;
4.O acceso externo aos cepillos permite unha substitución sinxela para prolongar aínda máis a vida do motor;
5.Alto par de arranque;
6.Freado dinámico para parar máis rápido;
7.Rotación reversible;
8.Simple conexión de dous fíos;
illamento 9.Class F, conmutador de soldadura de alta temperatura.
10.Alto rendemento, alto custo e baixa interferencia.
Aplicacións
É amplamente utilizado nos campos da casa intelixente, dispositivos médicos de precisión, condución de automóbiles, produtos electrónicos de consumo, equipos de masaxe e coidados de saúde, ferramentas de coidado persoal, transmisión de robot intelixente, automatización industrial, equipos mecánicos automáticos, produtos dixitais, etc.
Ilustración de performance



Sistema servo: é un sistema de control automático que permite que as cantidades controladas de saída, como a posición, a orientación e o estado dun obxecto, sigan calquera cambio no obxectivo de entrada (ou valor dado). A tarefa principal do servo é amplificar, transformar e regular a potencia segundo os requisitos do mando de control, de xeito que o par, a velocidade e a posición emitida polo dispositivo de accionamento poidan controlarse de forma moi flexible e cómoda.
Debido ao seu rendemento "servo", chámase servomotor. A súa función é converter o sinal de control da tensión de entrada no desprazamento angular de saída e na velocidade angular do eixe para conducir o obxecto de control.
Principio de servomotor DC
O principio de funcionamento do servomotor DC é basicamente o mesmo que o do motor DC común. O par electromagnético xérase pola acción do fluxo de aire da armadura e do fluxo magnético do espazo de aire para facer xirar o servomotor. Normalmente, o método de control da armadura úsase para cambiar a velocidade cambiando a tensión mantendo constante a tensión de excitación. Canto menor é a tensión, menor é a velocidade e, cando a tensión é cero, deixa de xirar. Porque cando a tensión é cero, a corrente tamén é cero, polo que o motor non xerará par electromagnético, nin aparecerá o fenómeno de auto-rotación.







